代码随想录算法训练营第69天:图论7
109. 冗余连接II
卡码网题目链接(ACM模式)(opens new window)
题目描述
有向树指满足以下条件的有向图。该树只有一个根节点,所有其他节点都是该根节点的后继。该树除了根节点之外的每一个节点都有且只有一个父节点,而根节点没有父节点。有向树拥有 n 个节点和 n - 1 条边。
输入一个有向图,该图由一个有着 n 个节点(节点编号 从 1 到 n),n 条边,请返回一条可以删除的边,使得删除该条边之后该有向图可以被当作一颗有向树。
输入描述
第一行输入一个整数 N,表示有向图中节点和边的个数。
后续 N 行,每行输入两个整数 s 和 t,代表 s 节点有一条连接 t 节点的单向边
输出描述
输出一条可以删除的边,若有多条边可以删除,请输出标准输入中最后出现的一条边。
输入示例
3
1 2
1 3
2 3
输出示例
2 3
提示信息

在删除 2 3 后有向图可以变为一棵合法的有向树,所以输出 2 3
数据范围:
1 <= N <= 1000.
#思路
本题与 108.冗余连接 类似,但本题是一个有向图,有向图相对要复杂一些。
本题的本质是 :有一个有向图,是由一颗有向树 + 一条有向边组成的 (所以此时这个图就不能称之为有向树),现在让我们找到那条边 把这条边删了,让这个图恢复为有向树。
还有“若有多条边可以删除,请输出标准输入中最后出现的一条边”,这说明在两条边都可以删除的情况下,要删顺序靠后的边!
我们来想一下 有向树的性质,如果是有向树的话,只有根节点入度为0,其他节点入度都为1(因为该树除了根节点之外的每一个节点都有且只有一个父节点,而根节点没有父节点)。
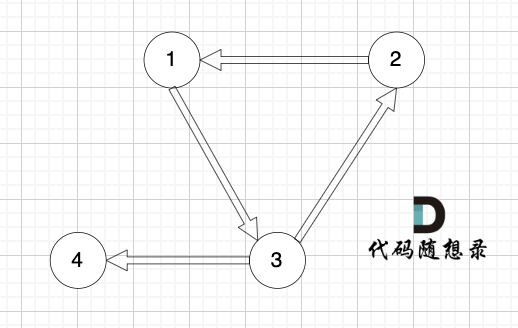
所以情况一:如果我们找到入度为2的点,那么删一条指向该节点的边就行了。
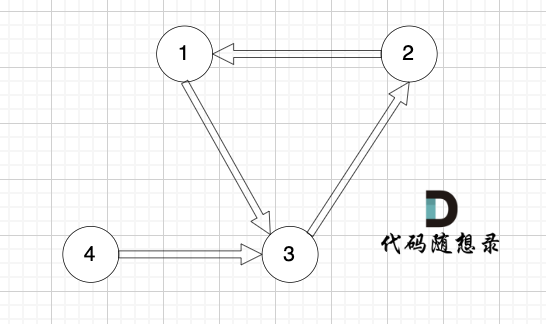
如图:
找到了节点3 的入度为2,删 1 -> 3 或者 2 -> 3 。选择删顺序靠后便可。
但 入度为2 还有一种情况,情况二,只能删特定的一条边,如图:
节点3 的入度为 2,但在删除边的时候,只能删 这条边(节点1 -> 节点3),如果删这条边(节点4 -> 节点3),那么删后本图也不是有向树了(因为找不到根节点)。
综上,如果发现入度为2的节点,我们需要判断 删除哪一条边,删除后本图能成为有向树。如果是删哪个都可以,优先删顺序靠后的边。
情况三: 如果没有入度为2的点,说明 图中有环了(注意是有向环)。
如图:
对于情况二,删掉构成环的边就可以了。
#写代码
把每条边记录下来,并统计节点入度:
int s, t;
vector<vector<int>> edges;
cin >> n;
vector<int> inDegree(n + 1, 0); // 记录节点入度
for (int i = 0; i < n; i++) {
cin >> s >> t;
inDegree[t]++;
edges.push_back({s, t});
}
前两种入度为2的情况,一定是删除指向入度为2的节点的两条边其中的一条,如果删了一条,判断这个图是一个树,那么这条边就是答案。
同时注意要从后向前遍历,因为如果两条边删哪一条都可以成为树,就删最后那一条。
代码如下:
vector<int> vec; // 记录入度为2的边(如果有的话就两条边)
// 找入度为2的节点所对应的边,注意要倒序,因为优先删除最后出现的一条边
for (int i = n - 1; i >= 0; i--) {
if (inDegree[edges[i][1]] == 2) {
vec.push_back(i);
}
}
if (vec.size() > 0) {
// 放在vec里的边已经按照倒叙放的,所以这里就优先删vec[0]这条边
if (isTreeAfterRemoveEdge(edges, vec[0])) {
cout << edges[vec[0]][0] << " " << edges[vec[0]][1];
} else {
cout << edges[vec[1]][0] << " " << edges[vec[1]][1];
}
return 0;
}
再来看情况三,明确没有入度为2的情况,那么一定有向环,找到构成环的边就是要删除的边。
可以定义一个函数,代码如下:
// 在有向图里找到删除的那条边,使其变成树
void getRemoveEdge(const vector<vector<int>>& edges)
大家应该知道了,我们要解决本题要实现两个最为关键的函数:
-
isTreeAfterRemoveEdge() 判断删一个边之后是不是有向树 -
getRemoveEdge() 确定图中一定有了有向环,那么要找到需要删除的那条边
此时就用到并查集了。
如果还不了解并查集,可以看这里:并查集理论基础(opens new window)
isTreeAfterRemoveEdge() 判断删一个边之后是不是有向树: 将所有边的两端节点分别加入并查集,遇到要 要删除的边则跳过,如果遇到即将加入并查集的边的两端节点 本来就在并查集了,说明构成了环。
如果顺利将所有边的两端节点(除了要删除的边)加入了并查集,则说明 删除该条边 还是一个有向树
getRemoveEdge()确定图中一定有了有向环,那么要找到需要删除的那条边: 将所有边的两端节点分别加入并查集,如果遇到即将加入并查集的边的两端节点 本来就在并查集了,说明构成了环。
本题C++代码如下:(详细注释了)
#include <iostream>
#include <vector>
using namespace std;
int n;
vector<int> father (1001, 0);
// 并查集初始化
void init() {
for (int i = 1; i <= n; ++i) {
father[i] = i;
}
}
// 并查集里寻根的过程
int find(int u) {
return u == father[u] ? u : father[u] = find(father[u]);
}
// 将v->u 这条边加入并查集
void join(int u, int v) {
u = find(u);
v = find(v);
if (u == v) return ;
father[v] = u;
}
// 判断 u 和 v是否找到同一个根
bool same(int u, int v) {
u = find(u);
v = find(v);
return u == v;
}
// 在有向图里找到删除的那条边,使其变成树
void getRemoveEdge(const vector<vector<int>>& edges) {
init(); // 初始化并查集
for (int i = 0; i < n; i++) { // 遍历所有的边
if (same(edges[i][0], edges[i][1])) { // 构成有向环了,就是要删除的边
cout << edges[i][0] << " " << edges[i][1];
return;
} else {
join(edges[i][0], edges[i][1]);
}
}
}
// 删一条边之后判断是不是树
bool isTreeAfterRemoveEdge(const vector<vector<int>>& edges, int deleteEdge) {
init(); // 初始化并查集
for (int i = 0; i < n; i++) {
if (i == deleteEdge) continue;
if (same(edges[i][0], edges[i][1])) { // 构成有向环了,一定不是树
return false;
}
join(edges[i][0], edges[i][1]);
}
return true;
}
int main() {
int s, t;
vector<vector<int>> edges;
cin >> n;
vector<int> inDegree(n + 1, 0); // 记录节点入度
for (int i = 0; i < n; i++) {
cin >> s >> t;
inDegree[t]++;
edges.push_back({s, t});
}
vector<int> vec; // 记录入度为2的边(如果有的话就两条边)
// 找入度为2的节点所对应的边,注意要倒序,因为优先删除最后出现的一条边
for (int i = n - 1; i >= 0; i--) {
if (inDegree[edges[i][1]] == 2) {
vec.push_back(i);
}
}
if (vec.size() > 0) {
// 放在vec里的边已经按照倒叙放的,所以这里就优先删vec[0]这条边
if (isTreeAfterRemoveEdge(edges, vec[0])) {
cout << edges[vec[0]][0] << " " << edges[vec[0]][1];
} else {
cout << edges[vec[1]][0] << " " << edges[vec[1]][1];
}
return 0;
}
// 处理情况三
// 明确没有入度为2的情况,那么一定有有向环,找到构成环的边返回就可以了
getRemoveEdge(edges);
}
prim算法精讲
卡码网:53. 寻宝(opens new window)
题目描述:
在世界的某个区域,有一些分散的神秘岛屿,每个岛屿上都有一种珍稀的资源或者宝藏。国王打算在这些岛屿上建公路,方便运输。
不同岛屿之间,路途距离不同,国王希望你可以规划建公路的方案,如何可以以最短的总公路距离将 所有岛屿联通起来。
给定一张地图,其中包括了所有的岛屿,以及它们之间的距离。以最小化公路建设长度,确保可以链接到所有岛屿。
输入描述:
第一行包含两个整数V 和 E,V代表顶点数,E代表边数 。顶点编号是从1到V。例如:V=2,一个有两个顶点,分别是1和2。
接下来共有 E 行,每行三个整数 v1,v2 和 val,v1 和 v2 为边的起点和终点,val代表边的权值。
输出描述:
输出联通所有岛屿的最小路径总距离
输入示例:
7 11
1 2 1
1 3 1
1 5 2
2 6 1
2 4 2
2 3 2
3 4 1
4 5 1
5 6 2
5 7 1
6 7 1
输出示例:
6
#解题思路
本题是最小生成树的模板题,那么我们来讲一讲最小生成树。
最小生成树 可以使用 prim算法 也可以使用 kruskal算法计算出来。
本篇我们先讲解 prim算法。
最小生成树是所有节点的最小连通子图, 即:以最小的成本(边的权值)将图中所有节点链接到一起。
图中有n个节点,那么一定可以用 n - 1 条边将所有节点连接到一起。
那么如何选择 这 n-1 条边 就是 最小生成树算法的任务所在。
例如本题示例中的无向有权图为:
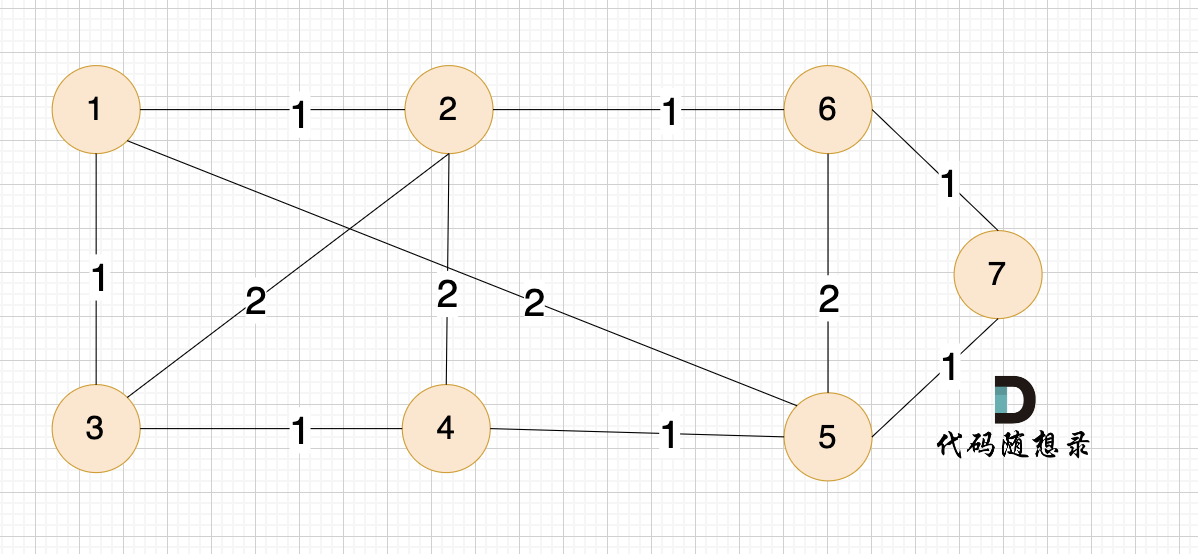
那么在这个图中,如何选取 n-1 条边 使得 图中所有节点连接到一起,并且边的权值和最小呢?
(图中为n为7,即7个节点,那么只需要 n-1 即 6条边就可以讲所有顶点连接到一起)
prim算法 是从节点的角度 采用贪心的策略 每次寻找距离 最小生成树最近的节点 并加入到最小生成树中。
prim算法核心就是三步,我称为prim三部曲,大家一定要熟悉这三步,代码相对会好些很多:
- 第一步,选距离生成树最近节点
- 第二步,最近节点加入生成树
- 第三步,更新非生成树节点到生成树的距离(即更新minDist数组)
现在录友们会对这三步很陌生,不知道这是干啥的,没关系,下面将会画图举例来带大家把这prim三部曲理解到位。
在prim算法中,有一个数组特别重要,这里我起名为:minDist。
刚刚我有讲过 “每次寻找距离 最小生成树最近的节点 并加入到最小生成树中”,那么如何寻找距离最小生成树最近的节点呢?
这就用到了 minDist 数组, 它用来作什么呢?
minDist数组 用来记录 每一个节点距离最小生成树的最近距离。 理解这一点非常重要,这也是 prim算法最核心要点所在,很多录友看不懂prim算法的代码,都是因为没有理解透 这个数组的含义。
接下来,我们来通过一步一步画图,来带大家巩固 prim三部曲 以及 minDist数组 的作用。
(示例中节点编号是从1开始,所以为了让大家看的不晕,minDist数组下标我也从 1 开始计数,下标0 就不使用了,这样 下标和节点标号就可以对应上了,避免大家搞混)
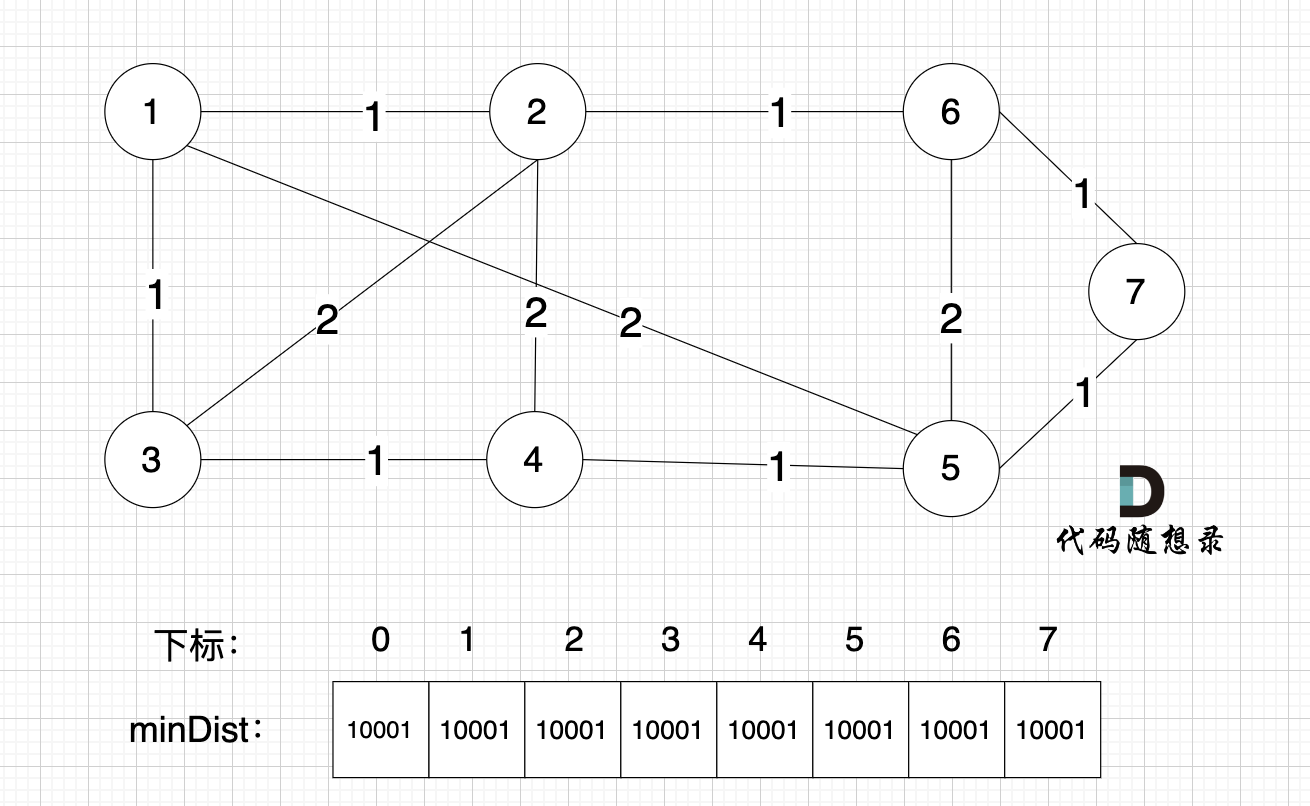
#1 初始状态
minDist 数组 里的数值初始化为 最大数,因为本题 节点距离不会超过 10000,所以 初始化最大数为 10001就可以。
相信这里录友就要问了,为什么这么做?
现在 还没有最小生成树,默认每个节点距离最小生成树是最大的,这样后面我们在比较的时候,发现更近的距离,才能更新到 minDist 数组上。
如图:
开始构造最小生成树
#2
1、prim三部曲,第一步:选距离生成树最近节点
选择距离最小生成树最近的节点,加入到最小生成树,刚开始还没有最小生成树,所以随便选一个节点加入就好(因为每一个节点一定会在最小生成树里,所以随便选一个就好),那我们选择节点1 (符合遍历数组的习惯,第一个遍历的也是节点1)
2、prim三部曲,第二步:最近节点加入生成树
此时 节点1 已经算最小生成树的节点。
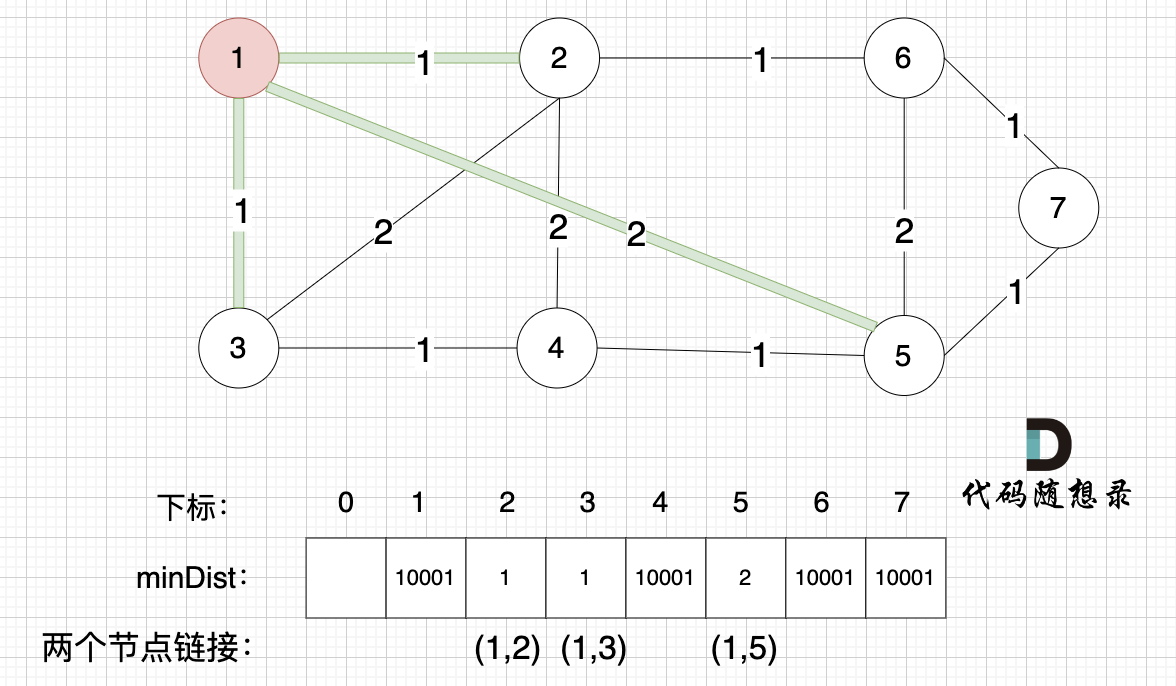
3、prim三部曲,第三步:更新非生成树节点到生成树的距离(即更新minDist数组)
接下来,我们要更新所有节点距离最小生成树的距离,如图:
注意下标0,我们就不管它了,下标 1 与节点 1 对应,这样可以避免大家把节点搞混。
此时所有非生成树的节点距离 最小生成树(节点1)的距离都已经跟新了 。
- 节点2 与 节点1 的距离为1,比原先的 距离值10001小,所以更新minDist[2]。
- 节点3 和 节点1 的距离为1,比原先的 距离值10001小,所以更新minDist[3]。
- 节点5 和 节点1 的距离为2,比原先的 距离值10001小,所以更新minDist[5]。
注意图中我标记了 minDist数组里更新的权值,是哪两个节点之间的权值,例如 minDist[2] =1 ,这个 1 是 节点1 与 节点2 之间的连线,清楚这一点对最后我们记录 最小生成树的权值总和很重要。
(我在后面依然会不断重复 prim三部曲,可能基础好的录友会感觉有点啰嗦,但也是让大家感觉这三部曲求解的过程)
#3
1、prim三部曲,第一步:选距离生成树最近节点
选取一个距离 最小生成树(节点1) 最近的非生成树里的节点,节点2,3,5 距离 最小生成树(节点1) 最近,选节点 2(其实选 节点3或者节点2都可以,距离一样的)加入最小生成树。
2、prim三部曲,第二步:最近节点加入生成树
此时 节点1 和 节点2,已经算最小生成树的节点。
3、prim三部曲,第三步:更新非生成树节点到生成树的距离(即更新minDist数组)
接下来,我们要更新节点距离最小生成树的距离,如图:
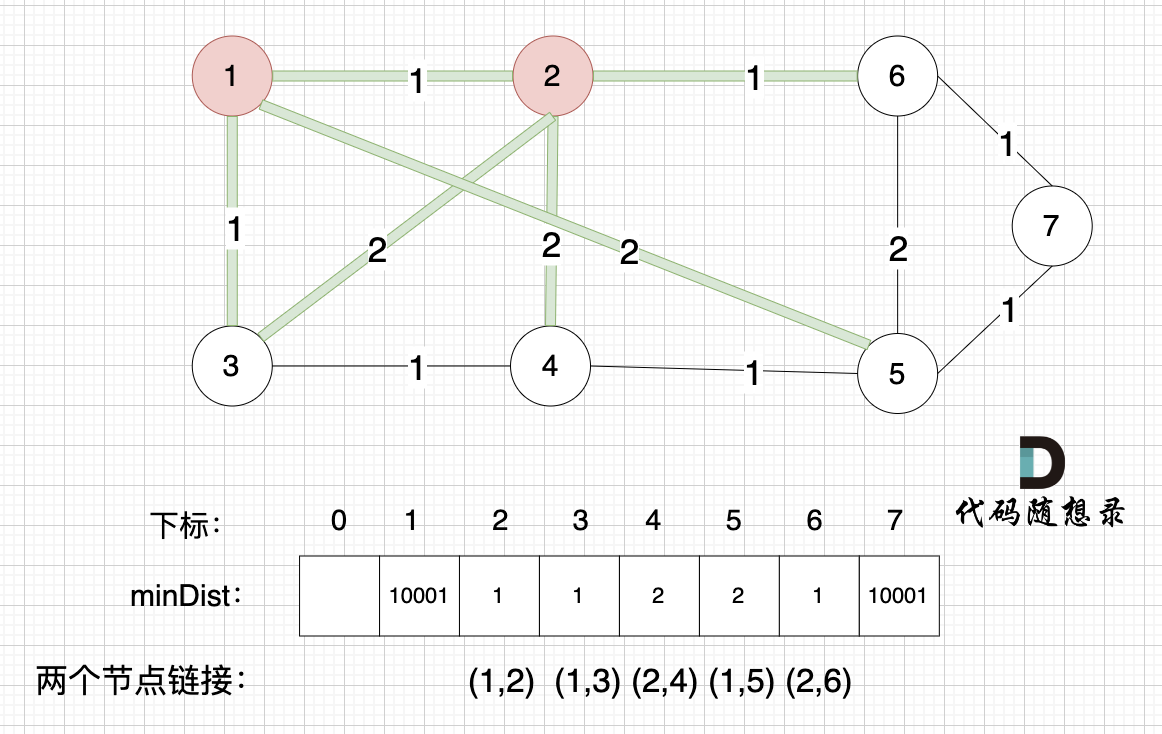
此时所有非生成树的节点距离 最小生成树(节点1、节点2)的距离都已经跟新了 。
- 节点3 和 节点2 的距离为2,和原先的距离值1 小,所以不用更新。
- 节点4 和 节点2 的距离为2,比原先的距离值10001小,所以更新minDist[4]。
- 节点5 和 节点2 的距离为10001(不连接),所以不用更新。
- 节点6 和 节点2 的距离为1,比原先的距离值10001小,所以更新minDist[6]。
#4
1、prim三部曲,第一步:选距离生成树最近节点
选择一个距离 最小生成树(节点1、节点2) 最近的非生成树里的节点,节点3,6 距离 最小生成树(节点1、节点2) 最近,选节点3 (选节点6也可以,距离一样)加入最小生成树。
2、prim三部曲,第二步:最近节点加入生成树
此时 节点1 、节点2 、节点3 算是最小生成树的节点。
3、prim三部曲,第三步:更新非生成树节点到生成树的距离(即更新minDist数组)
接下来更新节点距离最小生成树的距离,如图:
所有非生成树的节点距离 最小生成树(节点1、节点2、节点3 )的距离都已经跟新了 。
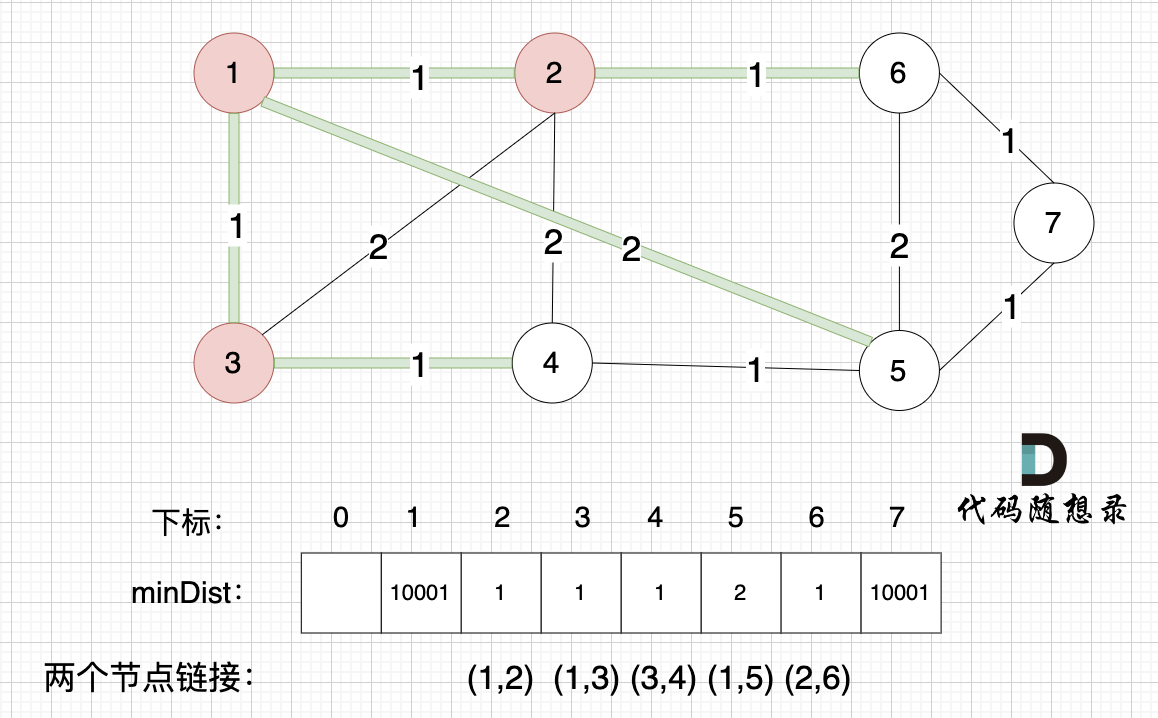
- 节点 4 和 节点 3的距离为 1,和原先的距离值 2 小,所以更新minDist[3]为1。
上面为什么我们只比较 节点4 和 节点3 的距离呢?
因为节点3加入 最小生成树后,非 生成树节点 只有 节点 4 和 节点3是链接的,所以需要重新更新一下 节点4距离最小生成树的距离,其他节点距离最小生成树的距离 都不变。
#5
1、prim三部曲,第一步:选距离生成树最近节点
继续选择一个距离 最小生成树(节点1、节点2、节点3) 最近的非生成树里的节点,为了巩固大家对 minDist数组的理解,这里我再啰嗦一遍:
minDist数组 是记录了 所有非生成树节点距离生成树的最小距离,所以 从数组里我们能看出来,非生成树节点 4 和 节点 6 距离 生成树最近。
任选一个加入生成树,我们选 节点4(选节点6也行) 。
注意,我们根据 minDist数组,选取距离 生成树 最近的节点 加入生成树,那么 minDist数组里记录的其实也是 最小生成树的边的权值(我在图中把权值对应的是哪两个节点也标记出来了)。
如果大家不理解,可以跟着我们下面的讲解,看 minDist数组的变化, minDist数组 里记录的权值对应的哪条边。
理解这一点很重要,因为 最后我们要求 最小生成树里所有边的权值和。
2、prim三部曲,第二步:最近节点加入生成树
此时 节点1、节点2、节点3、节点4 算是 最小生成树的节点。
3、prim三部曲,第三步:更新非生成树节点到生成树的距离(即更新minDist数组)
接下来更新节点距离最小生成树的距离,如图:

minDist数组已经更新了 所有非生成树的节点距离 最小生成树(节点1、节点2、节点3、节点4 )的距离 。
- 节点 5 和 节点 4的距离为 1,和原先的距离值 2 小,所以更新minDist[4]为1。
#6
1、prim三部曲,第一步:选距离生成树最近节点
继续选距离 最小生成树(节点1、节点2、节点3、节点4 )最近的非生成树里的节点,只有 节点 5 和 节点6。
选节点5 (选节点6也可以)加入 生成树。
2、prim三部曲,第二步:最近节点加入生成树
节点1、节点2、节点3、节点4、节点5 算是 最小生成树的节点。
3、prim三部曲,第三步:更新非生成树节点到生成树的距离(即更新minDist数组)
接下来更新节点距离最小生成树的距离,如图:
minDist数组已经更新了 所有非生成树的节点距离 最小生成树(节点1、节点2、节点3、节点4 、节点5)的距离 。
- 节点 6 和 节点 5 距离为 2,比原先的距离值 1 大,所以不更新
- 节点 7 和 节点 5 距离为 1,比原先的距离值 10001小,更新 minDist[7]
#7
1、prim三部曲,第一步:选距离生成树最近节点
继续选距离 最小生成树(节点1、节点2、节点3、节点4 、节点5)最近的非生成树里的节点,只有 节点 6 和 节点7。
2、prim三部曲,第二步:最近节点加入生成树
选节点6 (选节点7也行,距离一样的)加入生成树。
3、prim三部曲,第三步:更新非生成树节点到生成树的距离(即更新minDist数组)
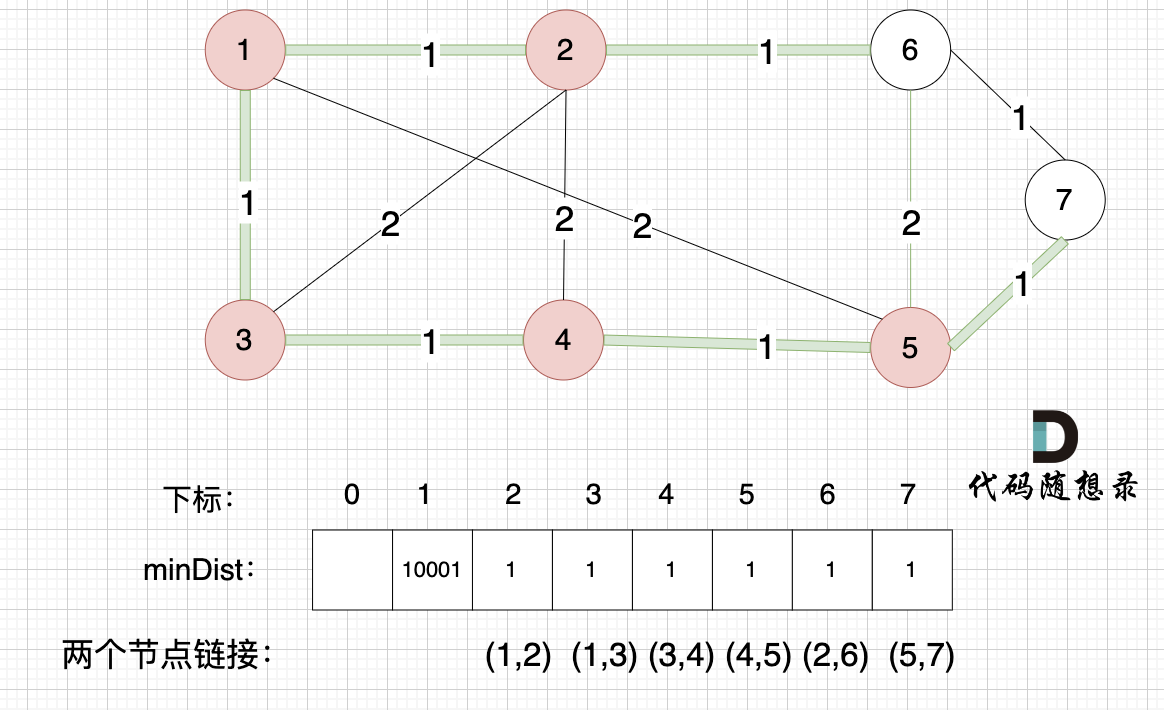
节点1、节点2、节点3、节点4、节点5、节点6 算是 最小生成树的节点 ,接下来更新节点距离最小生成树的距离,如图:
这里就不在重复描述了,大家类推,最后,节点7加入生成树,如图:

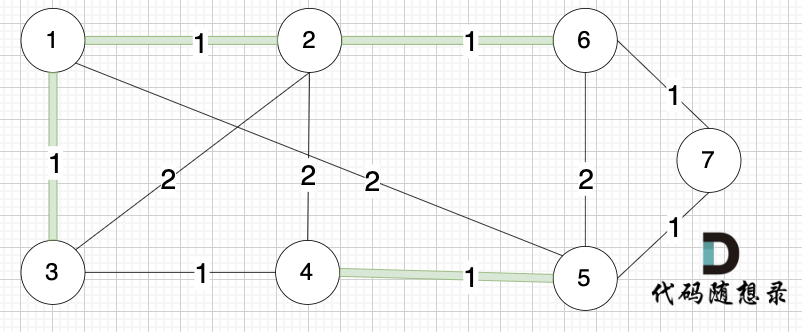
#最后
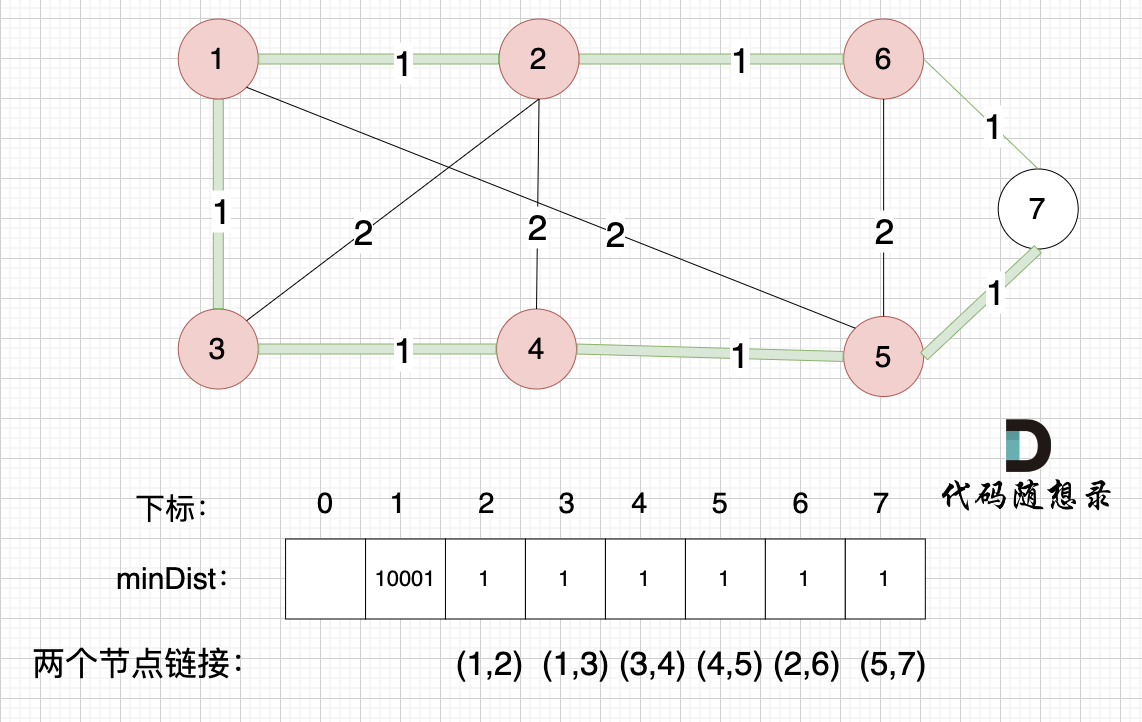
最后我们就生成了一个 最小生成树, 绿色的边将所有节点链接到一起,并且 保证权值是最小的,因为我们在更新 minDist 数组的时候,都是选距离 最小生成树最近的点 加入到树中。
讲解上面的模拟过程的时候,我已经强调多次 minDist数组 是记录了 所有非生成树节点距离生成树的最小距离。
最后,minDist数组 也就是记录的是最小生成树所有边的权值。
我在图中,特别把 每条边的权值对应的是哪两个节点 标记出来(例如minDist[7] = 1,对应的是节点5 和 节点7之间的边,而不是 节点6 和 节点7),为了就是让大家清楚, minDist里的每一个值 对应的是哪条边。
那么我们要求最小生成树里边的权值总和 就是 把 最后的 minDist 数组 累加一起。
以下代码,我对 prim三部曲,做了重点注释,大家根据这三步,就可以 透彻理解prim。
#include<iostream>
#include<vector>
#include <climits>
using namespace std;
int main() {
int v, e;
int x, y, k;
cin >> v >> e;
// 填一个默认最大值,题目描述val最大为10000
vector<vector<int>> grid(v + 1, vector<int>(v + 1, 10001));
while (e--) {
cin >> x >> y >> k;
// 因为是双向图,所以两个方向都要填上
grid[x][y] = k;
grid[y][x] = k;
}
// 所有节点到最小生成树的最小距离
vector<int> minDist(v + 1, 10001);
// 这个节点是否在树里
vector<bool> isInTree(v + 1, false);
// 我们只需要循环 n-1次,建立 n - 1条边,就可以把n个节点的图连在一起
for (int i = 1; i < v; i++) {
// 1、prim三部曲,第一步:选距离生成树最近节点
int cur = -1; // 选中哪个节点 加入最小生成树
int minVal = INT_MAX;
for (int j = 1; j <= v; j++) { // 1 - v,顶点编号,这里下标从1开始
// 选取最小生成树节点的条件:
// (1)不在最小生成树里
// (2)距离最小生成树最近的节点
if (!isInTree[j] && minDist[j] < minVal) {
minVal = minDist[j];
cur = j;
}
}
// 2、prim三部曲,第二步:最近节点(cur)加入生成树
isInTree[cur] = true;
// 3、prim三部曲,第三步:更新非生成树节点到生成树的距离(即更新minDist数组)
// cur节点加入之后, 最小生成树加入了新的节点,那么所有节点到 最小生成树的距离(即minDist数组)需要更新一下
// 由于cur节点是新加入到最小生成树,那么只需要关心与 cur 相连的 非生成树节点 的距离 是否比 原来 非生成树节点到生成树节点的距离更小了呢
for (int j = 1; j <= v; j++) {
// 更新的条件:
// (1)节点是 非生成树里的节点
// (2)与cur相连的某节点的权值 比 该某节点距离最小生成树的距离小
// 很多录友看到自己 就想不明白什么意思,其实就是 cur 是新加入 最小生成树的节点,那么 所有非生成树的节点距离生成树节点的最近距离 由于 cur的新加入,需要更新一下数据了
if (!isInTree[j] && grid[cur][j] < minDist[j]) {
minDist[j] = grid[cur][j];
}
}
}
// 统计结果
int result = 0;
for (int i = 2; i <= v; i++) { // 不计第一个顶点,因为统计的是边的权值,v个节点有 v-1条边
result += minDist[i];
}
cout << result << endl;
}
时间复杂度为 O(n^2),其中 n 为节点数量。
#拓展
上面讲解的是记录了最小生成树 所有边的权值,如果让打印出来 最小生成树的每条边呢? 或者说 要把这个最小生成树画出来呢?
此时我们就需要把 最小生成树里每一条边记录下来。
此时有两个问题:
- 1、用什么结构来记录
- 2、如何记录
如果记录边,其实就是记录两个节点就可以,两个节点连成一条边。
如何记录两个节点呢?
我们使用一维数组就可以记录。 parent[节点编号] = 节点编号, 这样就把一条边记录下来了。(当然如果节点编号非常大,可以考虑使用map)
使用一维数组记录是有向边,不过我们这里不需要记录方向,所以只关注两条边是连接的就行。
parent数组初始化代码:
vector<int> parent(v + 1, -1);
接下来就是第二个问题,如何记录?
我们再来回顾一下 prim三部曲,
- 第一步,选距离生成树最近节点
- 第二步,最近节点加入生成树
- 第三步,更新非生成树节点到生成树的距离(即更新minDist数组)
大家先思考一下,我们是在第几步,可以记录 最小生成树的边呢?
在本面上半篇 我们讲解过:“我们根据 minDist数组,选组距离 生成树 最近的节点 加入生成树,那么 minDist数组里记录的其实也是 最小生成树的边的权值。”
既然 minDist数组 记录了 最小生成树的边,是不是就是在更新 minDist数组 的时候,去更新parent数组来记录一下对应的边呢。
所以 在 prim三部曲中的第三步,更新 parent数组,代码如下:
for (int j = 1; j <= v; j++) {
if (!isInTree[j] && grid[cur][j] < minDist[j]) {
minDist[j] = grid[cur][j];
parent[j] = cur; // 记录最小生成树的边 (注意数组指向的顺序很重要)
}
}
代码中注释中,我强调了 数组指向的顺序很重要。 因为不少录友在这里会写成这样: parent[cur] = j 。
这里估计大家会疑惑了,parent[节点编号A] = 节点编号B, 就表示A 和 B 相连,我们这里就不用在意方向,代码中 为什么 只能 parent[j] = cur 而不能 parent[cur] = j 这么写呢?
如果写成 parent[cur] = j,在 for 循环中,有多个 j 满足要求, 那么 parent[cur] 就会被反复覆盖,因为 cur 是一个固定值。
举个例子,cur = 1, 在 for循环中,可能 就 j = 2, j = 3,j =4 都符合条件,那么本来应该记录 节点1 与 节点 2、节点3、节点4相连的。
如果 parent[cur] = j 这么写,最后更新的逻辑是 parent[1] = 2, parent[1] = 3, parent[1] = 4, 最后只能记录 节点1 与节点 4 相连,其他相连情况都被覆盖了。
如果这么写 parent[j] = cur, 那就是 parent[2] = 1, parent[3] = 1, parent[4] = 1 ,这样 才能完整表示出 节点1 与 其他节点都是链接的,才没有被覆盖。
主要问题也是我们使用了一维数组来记录。
如果是二维数组,来记录两个点链接,例如 parent[节点编号A][节点编号B] = 1 ,parent[节点编号B][节点编号A] = 1,来表示 节点A 与 节点B 相连,那就没有上面说的这个注意事项了,当然这么做的话,就是多开辟的内存空间。
以下是输出最小生成树边的代码,不算最后输出, 就额外添加了两行代码,我都注释标记了:
#include<iostream>
#include<vector>
#include <climits>
using namespace std;
int main() {
int v, e;
int x, y, k;
cin >> v >> e;
vector<vector<int>> grid(v + 1, vector<int>(v + 1, 10001));
while (e--) {
cin >> x >> y >> k;
grid[x][y] = k;
grid[y][x] = k;
}
vector<int> minDist(v + 1, 10001);
vector<bool> isInTree(v + 1, false);
//加上初始化
vector<int> parent(v + 1, -1);
for (int i = 1; i < v; i++) {
int cur = -1;
int minVal = INT_MAX;
for (int j = 1; j <= v; j++) {
if (!isInTree[j] && minDist[j] < minVal) {
minVal = minDist[j];
cur = j;
}
}
isInTree[cur] = true;
for (int j = 1; j <= v; j++) {
if (!isInTree[j] && grid[cur][j] < minDist[j]) {
minDist[j] = grid[cur][j];
parent[j] = cur; // 记录边
}
}
}
// 输出 最小生成树边的链接情况
for (int i = 1; i <= v; i++) {
cout << i << "->" << parent[i] << endl;
}
}
按照本题示例,代码输入如下:
1->-1
2->1
3->1
4->3
5->4
6->2
7->5
注意,这里是无向图,我在输出上添加了箭头仅仅是为了方便大家看出是边的意思。
大家可以和我们本题最后生成的最小生成树的图 去对比一下 边的链接情况:
绿色的边 是最小生成树,和我们的 输出完全一致。
#总结
此时我就把prim算法讲解完毕了,我们再来回顾一下。
关于 prim算法,我自创了三部曲,来帮助大家理解:
- 第一步,选距离生成树最近节点
- 第二步,最近节点加入生成树
- 第三步,更新非生成树节点到生成树的距离(即更新minDist数组)
大家只要理解这三部曲, prim算法 至少是可以写出一个框架出来,然后在慢慢补充细节,这样不至于 自己在写prim的时候 两眼一抹黑 完全凭感觉去写。 这也为什么很多录友感觉 prim算法比较难,而且每次学会来,隔一段时间 又不会写了,主要是 没有一个纲领。
理解这三部曲之后,更重要的 就是理解 minDist数组。
minDist数组 是prim算法的灵魂,它帮助 prim算法完成最重要的一步,就是如何找到 距离最小生成树最近的点。
再来帮大家回顾 minDist数组 的含义:记录 每一个节点距离最小生成树的最近距离。
理解 minDist数组 ,至少大家看prim算法的代码不会懵。
也正是 因为 minDist数组 的作用,我们根据 minDist数组,选取距离 生成树 最近的节点 加入生成树,那么 minDist数组里记录的其实也是 最小生成树的边的权值。
所以我们求 最小生成树的权值和 就是 计算后的 minDist数组 数值总和。
最后我们拓展了如何求职 最小生成树 的每一条边,其实 添加的代码很简单,主要是理解 为什么使用 parent数组 来记录边 以及 在哪里 更新parent数组。
同时,因为使用一维数组,数组的下标和数组 如何赋值很重要,不要搞反,导致结果被覆盖。
好了,以上为总结,录友们学习愉快。
kruskal算法精讲
卡码网:53. 寻宝(opens new window)
题目描述:
在世界的某个区域,有一些分散的神秘岛屿,每个岛屿上都有一种珍稀的资源或者宝藏。国王打算在这些岛屿上建公路,方便运输。
不同岛屿之间,路途距离不同,国王希望你可以规划建公路的方案,如何可以以最短的总公路距离将 所有岛屿联通起来。
给定一张地图,其中包括了所有的岛屿,以及它们之间的距离。以最小化公路建设长度,确保可以链接到所有岛屿。
输入描述:
第一行包含两个整数V 和 E,V代表顶点数,E代表边数 。顶点编号是从1到V。例如:V=2,一个有两个顶点,分别是1和2。
接下来共有 E 行,每行三个整数 v1,v2 和 val,v1 和 v2 为边的起点和终点,val代表边的权值。
输出描述:
输出联通所有岛屿的最小路径总距离
输入示例:
7 11
1 2 1
1 3 1
1 5 2
2 6 1
2 4 2
2 3 2
3 4 1
4 5 1
5 6 2
5 7 1
6 7 1
输出示例:
6
#解题思路
在上一篇 我们讲解了 prim算法求解 最小生成树,本篇我们来讲解另一个算法:Kruskal,同样可以求最小生成树。
prim 算法是维护节点的集合,而 Kruskal 是维护边的集合。
上来就这么说,大家应该看不太懂,这里是先让大家有这么个印象,带着这个印象在看下文,理解的会更到位一些。
kruscal的思路:
-
边的权值排序,因为要优先选最小的边加入到生成树里
-
遍历排序后的边
- 如果边首尾的两个节点在同一个集合,说明如果连上这条边图中会出现环
- 如果边首尾的两个节点不在同一个集合,加入到最小生成树,并把两个节点加入同一个集合
下面我们画图举例说明kruscal的工作过程。
依然以示例中,如下这个图来举例。

将图中的边按照权值有小到大排序,这样从贪心的角度来说,优先选 权值小的边加入到 最小生成树中。
排序后的边顺序为[(1,2) (4,5) (1,3) (2,6) (3,4) (6,7) (5,7) (1,5) (3,2) (2,4) (5,6)]
(1,2) 表示节点1 与 节点2 之间的边。权值相同的边,先后顺序无所谓。
开始从头遍历排序后的边。
选边(1,2),节点1 和 节点2 不在同一个集合,所以生成树可以添加边(1,2),并将 节点1,节点2 放在同一个集合。

选边(4,5),节点4 和 节点 5 不在同一个集合,生成树可以添加边(4,5) ,并将节点4,节点5 放到同一个集合。
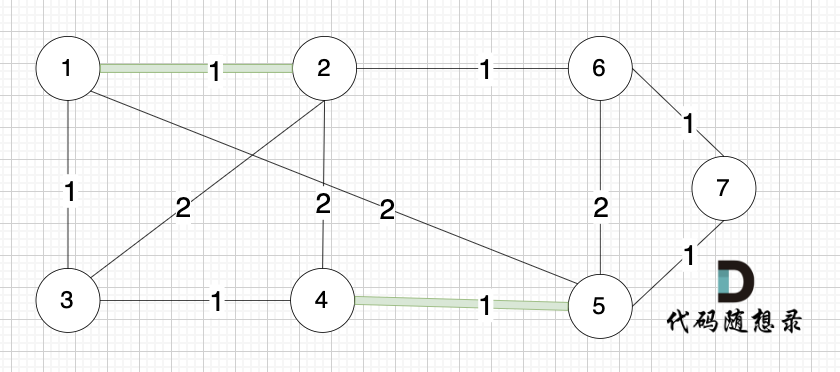
大家判断两个节点是否在同一个集合,就看图中两个节点是否有绿色的粗线连着就行
(这里在强调一下,以下选边是按照上面排序好的边的数组来选择的)
选边(1,3),节点1 和 节点3 不在同一个集合,生成树添加边(1,3),并将节点1,节点3 放到同一个集合。
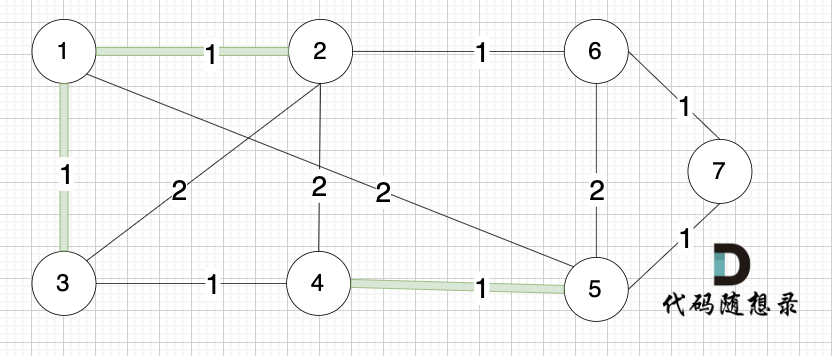
选边(2,6),节点2 和 节点6 不在同一个集合,生成树添加边(2,6),并将节点2,节点6 放到同一个集合。
选边(3,4),节点3 和 节点4 不在同一个集合,生成树添加边(3,4),并将节点3,节点4 放到同一个集合。

选边(6,7),节点6 和 节点7 不在同一个集合,生成树添加边(6,7),并将 节点6,节点7 放到同一个集合。
选边(5,7),节点5 和 节点7 在同一个集合,不做计算。
选边(1,5),两个节点在同一个集合,不做计算。
后面遍历 边(3,2),(2,4),(5,6) 同理,都因两个节点已经在同一集合,不做计算。
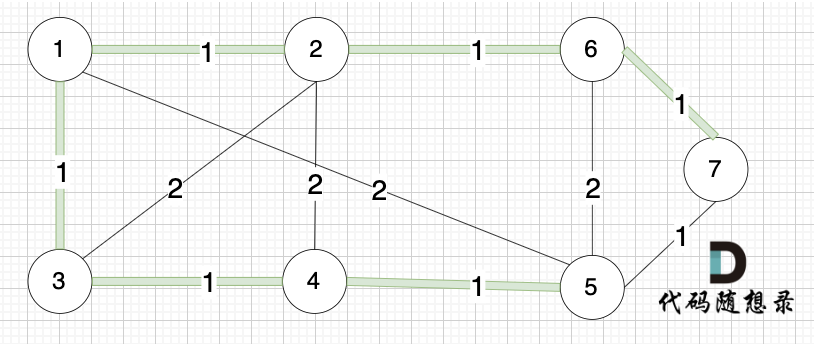
此时 我们就已经生成了一个最小生成树,即:
在上面的讲解中,看图的话 大家知道如何判断 两个节点 是否在同一个集合(是否有绿色的线连在一起),以及如何把两个节点加入集合(就在图中把两个节点连上)
但在代码中,如果将两个节点加入同一个集合,又如何判断两个节点是否在同一个集合呢?
这里就涉及到我们之前讲解的并查集。
我们在并查集开篇的时候就讲了,并查集主要就两个功能:
- 将两个元素添加到一个集合中
- 判断两个元素在不在同一个集合
大家发现这正好符合 Kruskal算法的需求,这也是为什么 我要先讲并查集,再讲 Kruskal。
关于 并查集,我已经在并查集精讲 详细讲解过了,所以这里不再赘述,我们直接用。
本题代码如下,已经详细注释:
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std;
// l,r为 边两边的节点,val为边的数值
struct Edge {
int l, r, val;
};
// 节点数量
int n = 10001;
// 并查集标记节点关系的数组
vector<int> father(n, -1); // 节点编号是从1开始的,n要大一些
// 并查集初始化
void init() {
for (int i = 0; i < n; ++i) {
father[i] = i;
}
}
// 并查集的查找操作
int find(int u) {
return u == father[u] ? u : father[u] = find(father[u]); // 路径压缩
}
// 并查集的加入集合
void join(int u, int v) {
u = find(u); // 寻找u的根
v = find(v); // 寻找v的根
if (u == v) return ; // 如果发现根相同,则说明在一个集合,不用两个节点相连直接返回
father[v] = u;
}
int main() {
int v, e;
int v1, v2, val;
vector<Edge> edges;
int result_val = 0;
cin >> v >> e;
while (e--) {
cin >> v1 >> v2 >> val;
edges.push_back({v1, v2, val});
}
// 执行Kruskal算法
// 按边的权值对边进行从小到大排序
sort(edges.begin(), edges.end(), [](const Edge& a, const Edge& b) {
return a.val < b.val;
});
// 并查集初始化
init();
// 从头开始遍历边
for (Edge edge : edges) {
// 并查集,搜出两个节点的祖先
int x = find(edge.l);
int y = find(edge.r);
// 如果祖先不同,则不在同一个集合
if (x != y) {
result_val += edge.val; // 这条边可以作为生成树的边
join(x, y); // 两个节点加入到同一个集合
}
}
cout << result_val << endl;
return 0;
}
时间复杂度:nlogn (快排) + logn (并查集) ,所以最后依然是 nlogn 。n为边的数量。
关于并查集时间复杂度,可以看我在 并查集理论基础 **(opens new window)** 的讲解。
#拓展一
如果题目要求将最小生成树的边输出的话,应该怎么办呢?
Kruskal 算法 输出边的话,相对prim 要容易很多,因为 Kruskal 本来就是直接操作边,边的结构自然清晰,不用像 prim一样 需要再节点练成线输出边 (因为prim是对节点操作,而 Kruskal是对边操作,这是本质区别)
本题中,边的结构为:
struct Edge {
int l, r, val;
};
那么我们只需要找到 在哪里把生成树的边保存下来就可以了。
当判断两个节点不在同一个集合的时候,这两个节点的边就加入到最小生成树, 所以添加边的操作在这里:
vector<Edge> result; // 存储最小生成树的边
// 如果祖先不同,则不在同一个集合
if (x != y) {
result.push_back(edge); // 记录最小生成树的边
result_val += edge.val; // 这条边可以作为生成树的边
join(x, y); // 两个节点加入到同一个集合
}
整体代码如下,为了突出重点,我仅仅将 打印最小生成树的部分代码注释了,大家更容易看到哪些改动。
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std;
struct Edge {
int l, r, val;
};
int n = 10001;
vector<int> father(n, -1);
void init() {
for (int i = 0; i < n; ++i) {
father[i] = i;
}
}
int find(int u) {
return u == father[u] ? u : father[u] = find(father[u]);
}
void join(int u, int v) {
u = find(u);
v = find(v);
if (u == v) return ;
father[v] = u;
}
int main() {
int v, e;
int v1, v2, val;
vector<Edge> edges;
int result_val = 0;
cin >> v >> e;
while (e--) {
cin >> v1 >> v2 >> val;
edges.push_back({v1, v2, val});
}
sort(edges.begin(), edges.end(), [](const Edge& a, const Edge& b) {
return a.val < b.val;
});
vector<Edge> result; // 存储最小生成树的边
init();
for (Edge edge : edges) {
int x = find(edge.l);
int y = find(edge.r);
if (x != y) {
result.push_back(edge); // 保存最小生成树的边
result_val += edge.val;
join(x, y);
}
}
// 打印最小生成树的边
for (Edge edge : result) {
cout << edge.l << " - " << edge.r << " : " << edge.val << endl;
}
return 0;
}
按照题目中的示例,打印边的输出为:
1 - 2 : 1
1 - 3 : 1
2 - 6 : 1
3 - 4 : 1
4 - 5 : 1
5 - 7 : 1
大家可能发现 怎么和我们 模拟画的图不一样,差别在于 代码生成的最小生成树中 节点5 和 节点7相连的。

其实造成这个差别 是对边排序的时候 权值相同的边先后顺序的问题导致的,无论相同权值边的顺序是什么样的,最后都能得出最小生成树。
#拓展二
此时我们已经讲完了 Kruskal 和 prim 两个解法来求最小生成树。
什么情况用哪个算法更合适呢。
Kruskal 与 prim 的关键区别在于,prim维护的是节点的集合,而 Kruskal 维护的是边的集合。 如果 一个图中,节点多,但边相对较少,那么使用Kruskal 更优。
有录友可能疑惑,一个图里怎么可能节点多,边却少呢?
节点未必一定要连着边那, 例如 这个图,大家能明显感受到边没有那么多对吧,但节点数量 和 上述我们讲的例子是一样的。
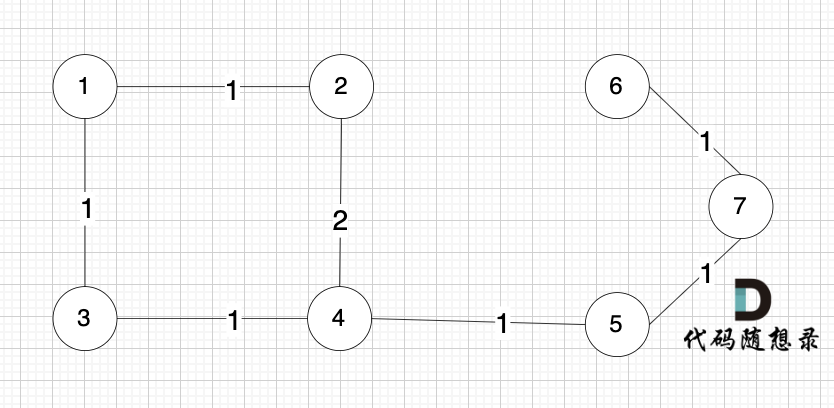
为什么边少的话,使用 Kruskal 更优呢?
因为 Kruskal 是对边进行排序的后 进行操作是否加入到最小生成树。
边如果少,那么遍历操作的次数就少。
在节点数量固定的情况下,图中的边越少,Kruskal 需要遍历的边也就越少。
而 prim 算法是对节点进行操作的,节点数量越少,prim算法效率就越优。
所以在 稀疏图中,用Kruskal更优。 在稠密图中,用prim算法更优。
边数量较少为稀疏图,接近或等于完全图(所有节点皆相连)为稠密图
Prim 算法 时间复杂度为 O(n^2),其中 n 为节点数量,它的运行效率和图中边树无关,适用稠密图。
Kruskal算法 时间复杂度 为 nlogn,其中n 为边的数量,适用稀疏图。
#总结
如果学过了并查集,其实 kruskal 比 prim更好理解一些。
本篇,我们依然通过模拟 Kruskal 算法的过程,来带大家一步步了解其工作过程。
在 拓展一 中讲解了 如何输出最小生成树的边。
在拓展二 中讲解了 prim 和 Kruskal的区别。
录友们可以细细体会。







![[数据集][目标检测]轮椅检测数据集VOC+YOLO格式13826张1类别](https://i-blog.csdnimg.cn/direct/18e3963b681549518a3c38b4aecd4e77.png)